Корзина (0)
Закрыть

Грузозахватные устройства с канатным приводом
Самозажимные грузозахватные устройства, в которых обжатие грузов осуществляется силой его тяжести, не всегда могут создать большое обжимное усилие, устранить предварительное скольжение и обеспечить необходимую маневренность и производительность. Эти качества присущи приводным грузозахватным устройствам, которые к тому же легко снабжать устройствами дистанционного управления с возможностью в ряде случаев осуществлять полную автоматизацию цикла захвата и освобождение груза.
Грузозахватные устройства с канатным приводом (рис. 1, а) получили применение в кранах с двумя механизмами подъема — главным и вспомогательным, наличие которых создает возможность дистанционного управления.
В корпусе закреплены оси, на которых свободно смонтированы коромысла и серьги, на концах которых подвешены клещевины. Губки клещевин при замыкании и размыкании совершают поступательные движения.
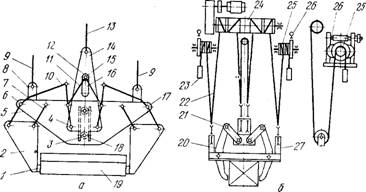
Рис. 1. Зажимное грузозахватное устройство с канатным приводом:
а — с помощью вспомогательного подъемного механизма; б — с помощью бесприводной лебедки; 1 — губка клещевины; 2 — клещевина; 3 — ползун; 4. 6, 15. 17- оси; 5 — корпус; 7 — серьга; 8- коромысло; 9 — канат механизма размыкания; 10, 11 — рычаги; 12 — ролики; 13 — захватный канат; 14 — тяга; 16 — паз; 18 — направляющая; 19 — груз; 20 — зажим; 21 — поводок; 22 — общий канат; 23 — противовес; 24 — механизм подъема; 25 — барабан; 26 — тормоз; 27 — грузозахватный механизм
Свободные концы коромысел связаны рычагами. Последние могут поворачиваться на осях, укрепленных на тяге. Вторые концы направляющих рычагов связаны с осью, на которую надеты ролики. Смещение последних в направлении, перпендикулярном к продольной оси, ограничивается пазом. Тяга связана канатом с механизмом подъема, а корпус грузозахватного устройства — с механизмом размыкания. Тяга снабжена ползунами, выполненными в виде роликов, перемещающихся в направляющих, закрепленных на корпусе.
Для транспортирования грузов грузозахватные устройства с разведенными клещевинами приближают к грузу так, чтобы он оказался между губками клещевин. Затем механизмом подъема поднимается тяга, коромысла поворачиваются, ползуны при этом перемещаются в направляющих, клещевины сближаются и захватывают груз губками. Губки клещевин принудительно удерживаются в одной горизонтальной плоскости перпендикулярно к оси тяги.
Принцип действия этого грузозахватного устройства аналогичен принципу действия двухканатного грейфера.
Несколько иной является схема грузозахватного устройства, приведенная на рис. 1, б. Для его привода можно применять кран с одним механизмом подъема, но он должен быть оборудован вспомогательными бесприводными, снабженными тормозами, барабанами. Грузозахватное устройство выполняют по схеме двухканатного грейфера, причем механизм подъема груза используют для поворота при помощи поводков зажимов, а бесприводные барабаны поддерживают грузозахватное устройство. На барабаны (бесприводной и механизма подъема) запасован с одинаковой кратностью общий канат, который заканчивается свободно свисающими с бесприводных барабанов контргрузами.
При опускании на груз раскрытого грузозахватного устройства бесприводной барабан затормаживается. Когда корпус грузозахватного устройства ляжет на груз, тормоз растормаживается и включается барабан механизма подъема. Происходит зажим груза, а после того, как усилие достигнет некоторого значения, начинается подъем противовесов (при перематывании канатов по блокам). Когда противовесы достигнут крайнего положения, бесприводные барабаны затормаживаются и происходит подъем груза. Грузозахватное устройство раскрывается в обратном направлении (порядке).